Die flexiblen Inspektionsroboter kommen überall dort zum Einsatz, wo lange Rohrleitungsstrecken mit vielen Bögen, Abzweigen und horizontalen Abschnitten inspiziert und geprüft werden müssen. Die Haupteinsatzgebiete liegen im Bereich der Kraftwerkstechnik, Raffinerien, Chemischer Anlagen, Petrochemischer Anlagen, der Getränkeindustrie und Pipelines bis 500 m Länge jeglicher Art.
Drei Antriebselemente sorgen für eine Geschwindigkeit von bis zu 200 m/h in horizontaler und vertikaler Richtung, wobei auch Bögen problemlos überwunden werden.


{kind=link}
{kind=link}
{kind=link}
{kind=link}
Die integrierte Farbkamera sieht wirklich alles
Zur Videoinspektion steht ein Inspektionskopf (der ab einem Innendurchmesser von 130 mm auch mit einer Dreh- und Schwenkvorrichtung ausgerüstet ist) mit einer integrierten Farbkamera zur Verfügung. Diese Kamera ist speziell für Inspektionsaufgaben innerhalb von diversen Rohrleitungen abgestimmt und besitzt neben einer hohen Auflösung einen 10-fach Zoom und einen automatischen sowie einen manuellen Focus. Darüber hinaus ist in den Inspektionskopf noch ein Beleuchtungsring mit 24 bzw. 48 leistungsstarken LED´s integriert, die eine hervorragende Ausleuchtung des Inspektionsbereiches gewährleisten. Die Beleuchtung ist dabei stufenlos regelbar.
Ein integrierter Laser zur Fehlerklassifizierung
Ebenfalls ab Typ 3000 ist in den Schwenk- und Neigekopf ein Laser zur Vermessung und Klassifizierung eventueller Schäden wie Risse oder Korrosion integriert. Der Punktlaser erlaubt es Fehlstellen mit einer Ausbreitung > 2 mm zu vermessen. Seine Genauigkeit ist besser als 0.1 mm.
Der Laser ist so justiert, dass die Oberflächenbeschaffenheit der Rohrinnenwand (z.B. stark glänzend, feucht oder sehr uneben) keine Rolle spielt. Ein Vermessen von Fehlstellen im Bogenbereich ist ebenfalls möglich. Der Laser kann mit Hilfe der Rotationseinheit des Schwenk- Neigekopfes gedreht werden und somit jeden Punkt innerhalb einer Rohrleitung vermessen.
Lasersoftware zur Profil- und Ovalitätsmessung
Diese Software wertet die Daten des Lasers aus und stellt sie grafisch dar. Es ist somit möglich ein Rohrprofil oder auch Innenkorossionsbereiche zu ermitteln, grafisch darzustellen und für weitere Analysen in einer Datenbank zu hinterlegen.
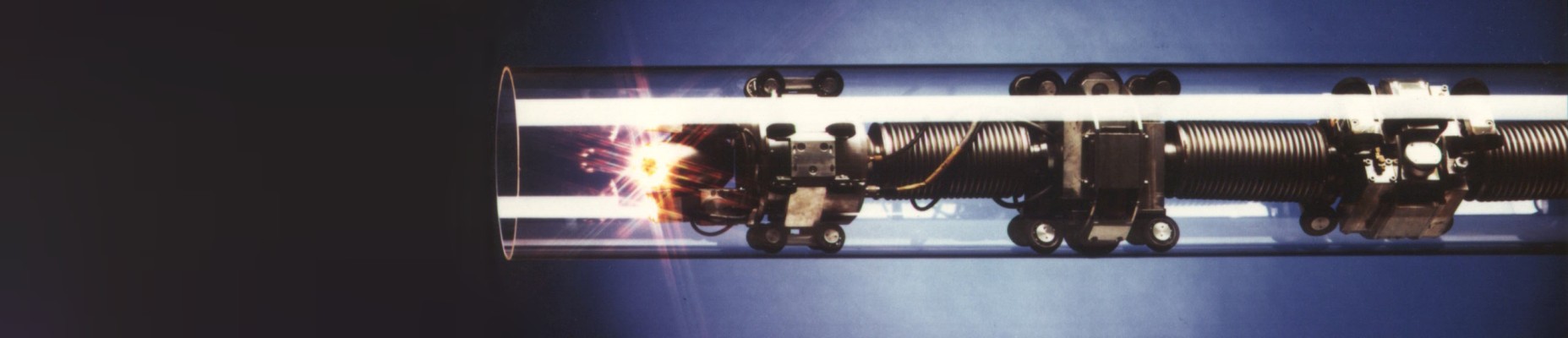
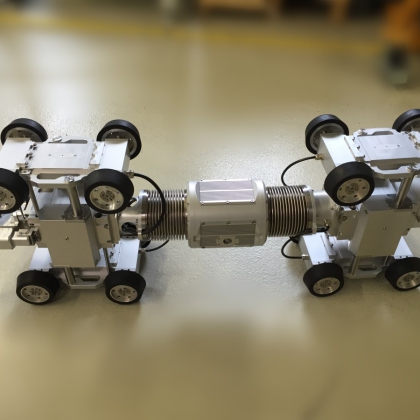
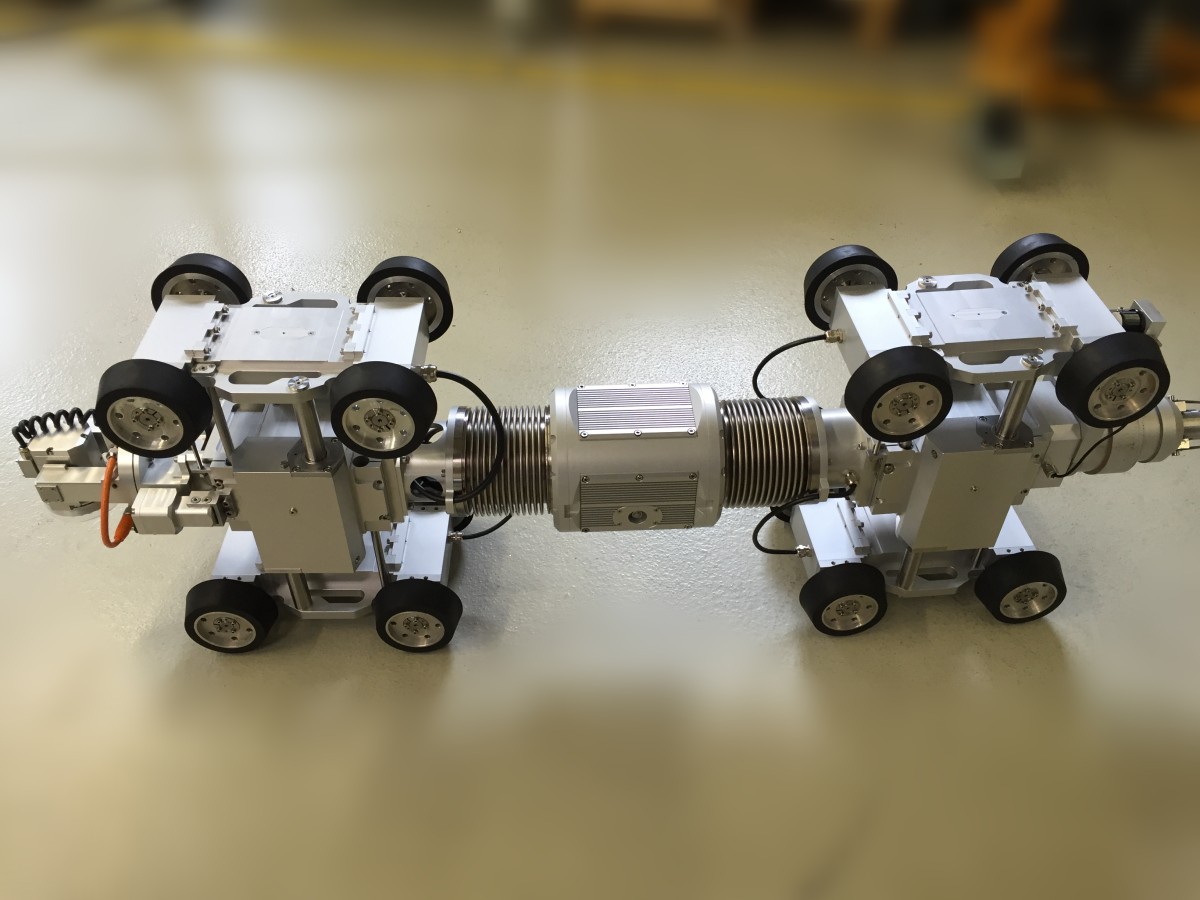
Die zur Video- und Laserinspektion verwendeten Inspektionsroboter bestehen standardmäßig aus drei Antriebselementen mit je zwei leistungsstarken Gleichstrommotoren - die flexibel über Faltenbälge miteinander verbunden sind - und einem Inspektionskopf.
Die drei Antriebselemente sorgen für eine Geschwindigkeit von bis zu 200 m/h in horizontaler und vertikaler Richtung, wobei auch Rohreinmündungen und Bögen mit einem Biegeradius größer als 1.5 D überwunden werden.
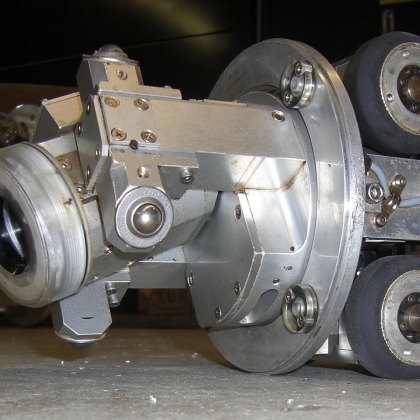
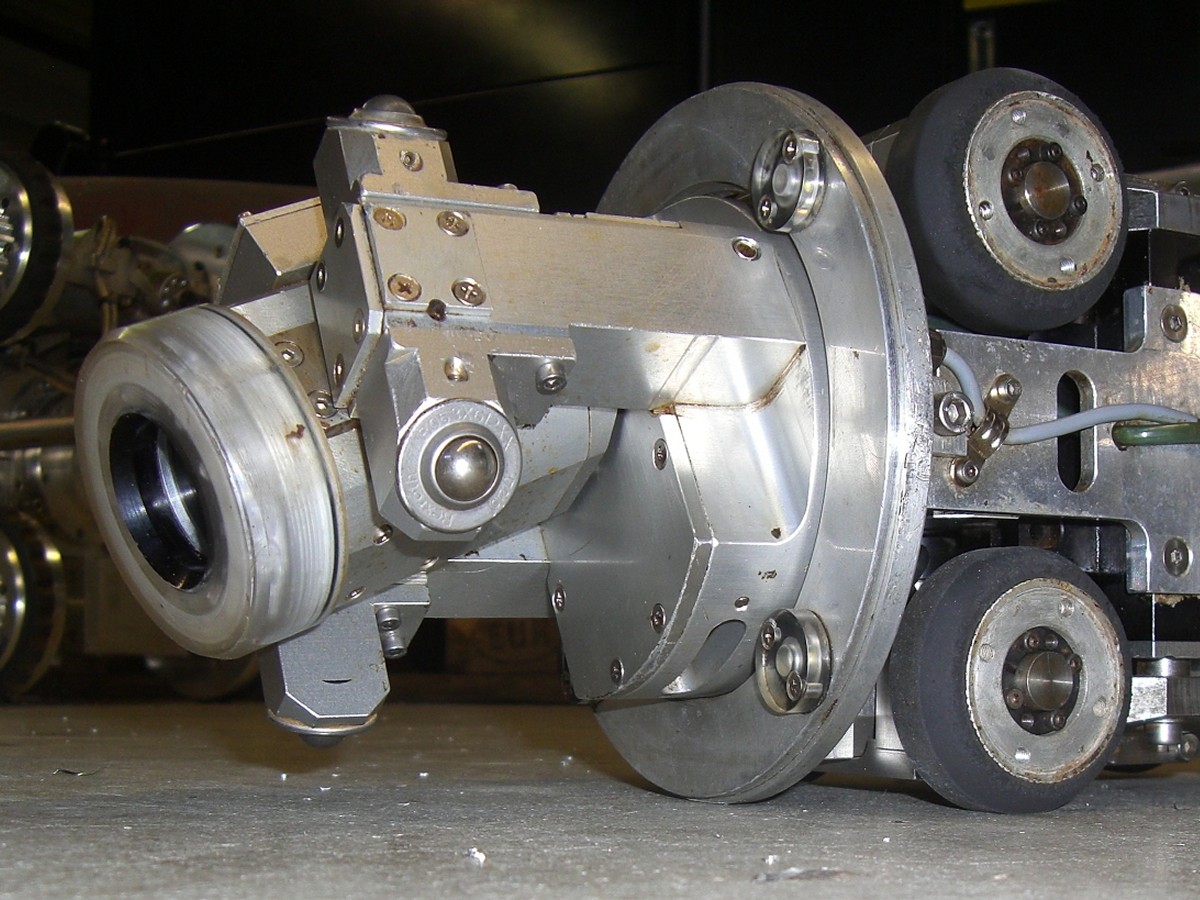
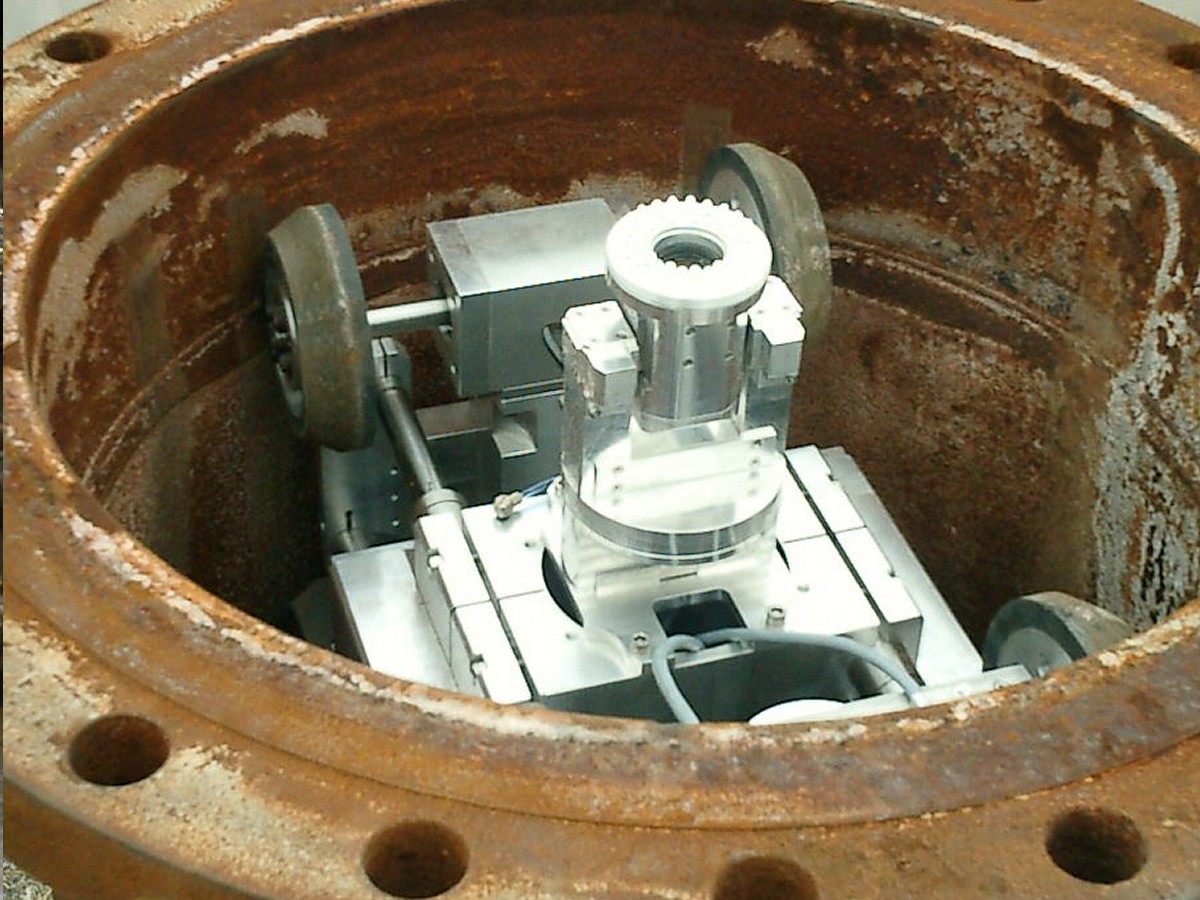
Eine Befahrung vertikaler Rohrleitungsstücke wird dadurch ermöglicht, dass Reibrollen mit einer speziellen Gummibeschichtung durch eine einstellbare Vorspannung an die Rohrinnenwand gepresst werden. Der Andruck der Gummiräder erfolgt mit Druckluft oder alternativ auch mit Federn. Dadurch ist es auch möglich, Schweißnähte mit großem Wurzeldurchhang zu überwinden.
Ein spezielles Elektrokabel oder ein Glasfaserkabel steuert den Rohrroboter und die Farbkamera und überträgt das Kamerabild zur Video- / Monitoreinheit. Die Steuerung des Inspektionsmanipulators und alle sonstigen Einstellungen werden vom Steuerpult bzw. Laptop aus bedient.
Weiterhin ermöglicht die modulare Bauweise der Rohrroboter zusätzlich zur Videoinspektion auch eine Adaption verschiedener Bearbeitungs- und Prüfelemente.
Für die Bearbeitung stehen z.B. Schleif- und Fräselemente zur Verfügung. Für Prüfungen gelangen Ultraschall- oder Wirbelstromköpfe zum Einsatz. Diese flexibel einsetzbaren Elemente ermöglichen eine genauere Klassifizierung der Fehlstellen innerhalb der Rohrleitungen und oftmals auch eine Schadensbehebung vor Ort.