
Eine unserer Stärken ist die Erarbeitung von kundenspezifischen Problemlösungen beim Bau von Rohrmanipulatoren. INSPECTOR SYSTEMS fertigt Rohrroboter zur Inneninspektion, Innenprüfung und Innenbearbeitung von Rohrsystemen, die selbstverständlich auch kundenspezifisch entwickelt und angepasst werden können. So entstehen ständig neue, auf das Einsatzgebiet optimal abgestimmte Maschinen.

{kind=link}
{kind=link}
{kind=link}
{kind=link}
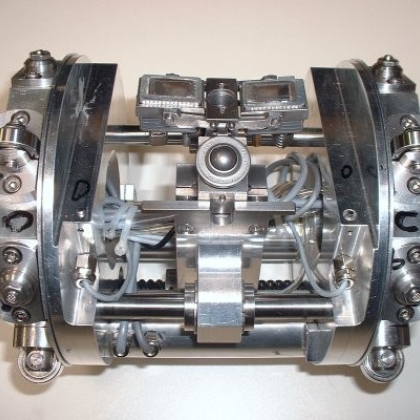
Beispiel: Ultraschall / Wirbelstrom Prüfroboter
Der Ultraschall / Wirbelstrom Prüfroboter wurde speziell zur Schweißnahtinspektion in Kernkraftwerken entwickelt und eingesetzt.
Er besteht im wesentlichen aus einem Prüfmodul, einer Antriebseinheit und einem Endtopf für Steuerungs- und Pneumatikkomponenten.
Das Prüfmodul ist so konzipiert, dass es als Mittelausführung zwischen zwei Drehflanschen stabil gelagert und über Führungselemente verbunden ist. Es besteht aus einem Sensorträger mit pneumatischem Hub für die radiale Zustellung der Ultraschallsensoren und des Wirbelstromsensors, einer Dreheinheit mit Zentriermöglichkeit und einer Axialverstellung für die Bewegung innerhalb des Rohres.
Am Prüfmodul ist weiterhin eine Frontkamera montiert, die einen Geradeausblick innerhalb der Rohrleitung ermöglicht.
Die Wirbelstrom- bzw. Ultraschallprüftechnik wurde von den Unternehmen Kontrolltechnik und Atus zur Verfügung gestellt.
Die über flexible Faltenbälge an das Prüfmodul montierte Antriebseinheit dient zum Transport des Prüfmoduls innerhalb der Rohrleitung, wobei auch Bögen durchfahren werden können. Die hohe Beweglichkeit des Gesamtsystems ermöglicht ein Einsetzen durch geöffnete Armaturen.
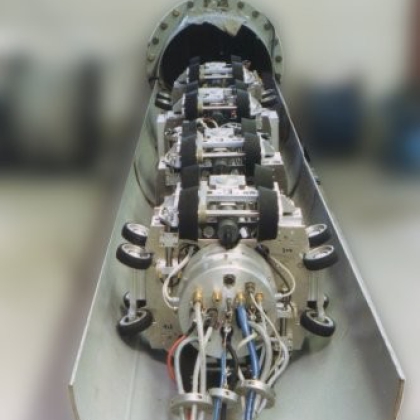
Beispiel: Multifunktionsroboter
Der Multifunktionsroboter wurde speziell zur Sanierung innen beschichteter Kühlwasserrohre entwickelt.
Im einzelnen haben wir eine Inspektionskamera, einen Ultraschallprüfkopf zur Wanddickenmessung, einen Schleifkopf, einen Schweißkopf und eine Beschichtungsvorrichtung an ein und dem selben Rohrmanipulator adaptiert.
Die einzelnen Funktionen des Multifunktionsroboters werden vom Bedienpult aus gesteuert.
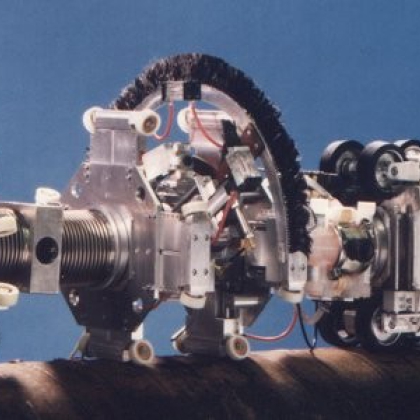
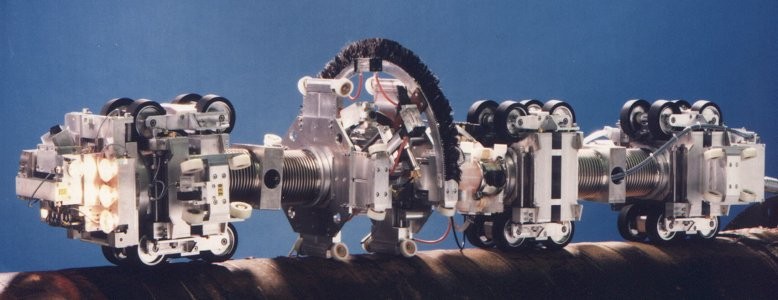
Beispiel: Prüfroboter für gummierte Rohre
Der Prüfroboter für gummierte Rohre wurde speziell entwickelt um Beschädigungen und Risse an gummierten Innenoberflächen von Rohren zu detektieren.
Er besitzt drei Antriebselemente und ein Prüfelement zur Funkendurchschlagmessung in der Mitte des Rohrroboters. Das Prüfelement selbst besteht aus einer speziellen "Bürste", die mit Hochspannung beaufschlagt werden kann.
Bei Fehlstellen entsteht durch die beschädigte Gummierung hindurch ein Funkendurchschlag zur Oberfläche des Stahlrohres hin, der dann ausgewertet werden kann.