
Renommierte Prüffirmen nutzen die Technologie von INSPECTOR SYSTEMS
Die technisch-wirtschaftliche Leistungsfähigkeit im Verbund mit der Sicherheit haben bei Kernkraftwerken oberste Priorität. Um diese Kriterien ganzheitlich zu erfüllen, bedarf es eines verantwortlichen Betriebsmanagements, vorbeugender Maßnahmen sowie einer permanenten Prüfung hinsichtlich Verschleißes und Alterung der Anlagenkomponenten. Zu den Maßnahmen gehören Überwachungen, Tests, Prüfungen und Wartungen, die permanent bzw. periodisch an den Anlagenkomponenten durchgeführt werden müssen.
Der Rohrleitungsprüfung kommt hier eine besondere Rolle zu, weil die verschiedenen Rohrleitungssysteme zu den zentralen Komponenten eines Kernkraftwerks zählen. Einer definierten Routine folgend, werden die Rohrleitungen und hier insbesondere die Schweißnahtverbindungen mittels verschiedener zerstörungsfreier Prüfmethoden wie Ultraschall, Wirbelstrom, Röntgendurchstrahlung, u.a. von außen auf Verschleißerscheinungen geprüft. Für spezielle Schweißnahtverbindungen haben die Betreiber der französischen Kernkraftwerke beschlossen, zusätzlich zu den äußerlichen Prüfungen auch noch die Durchführung verschiedener Checks der inneren Schweißnahtoberfläche durchzuführen.
Für dieses komplexe Projekt wurde INSPECTOR SYSTEMS beauftragt eine spezielle Roboterplattform zu entwickeln, die innerhalb einer Rohrleitung (auch im nassen und rutschigen Zustand) mehrere Bögen und vertikale Rohrleitungsabschnitte durchfahren kann. Diese Plattform musste dafür die Schweißnähte punktgenau anfahren können, um die relevanten Prüfsysteme exakt zu positionieren. Ein weiteres Kriterium war die Einbringung der Roboterplattform in die Rohrleitung durch ein Ventil mit beengten Platzverhältnissen. Diese Roboterplattform wurde dann verschiedenen Prüffirmen zur Verfügung gestellt, die in Zusammenarbeit mit INSPECTOR SYSTEMS Ihre Prüftechnologie an der Plattform adaptierten.
{kind=link}
{kind=link}
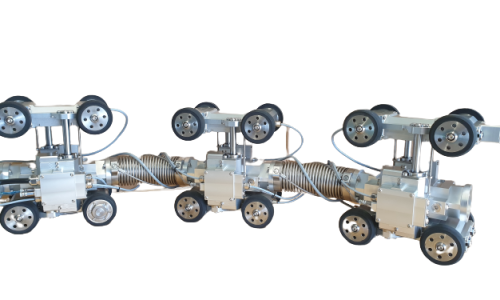
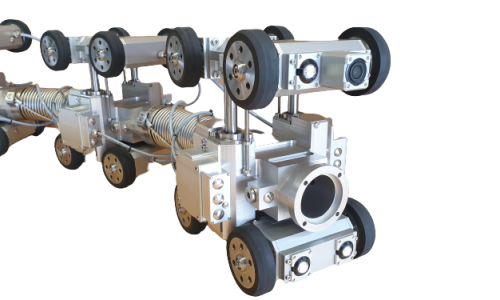
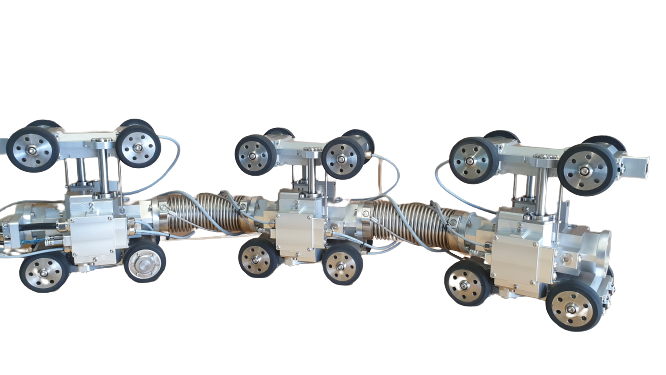
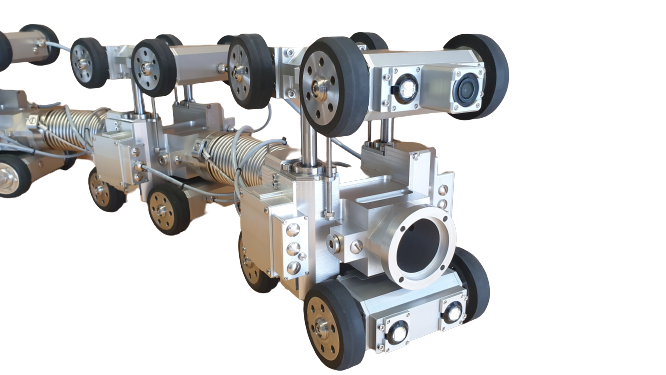
Die entwickelte Roboterplattform verfügt über insgesamt drei Antriebseinheiten, die jeweils aus einem Aluminiumblock und zwei Radsätzen bestehen und pneumatisch gegen die Rohrinnenwand gedrückt werden. Diese Antriebseinheiten sind über flexible Faltenbalgverbindungen miteinander verbunden. Die Antriebseinheiten wurden für diesen speziellen Anwendungsfall mit einer leistungsstarken Allradfunktion ausgestattet, um höhere Vortriebskräfte zu erzielen und im Bogenbereich eine gleichmäßigere Verteilung der Antriebskräfte zu gewährleisten. In Kombination mit einer spezifischen Geometrie und Gummimischung der Antriebsräder war somit ein optimaler Vortrieb in nassen, rutschigen und vertikalen Rohrleitungsabschnitten gewährleistet.
Insgesamt wurden seitens INSPECTOR SYSTEMS bisher zwölf Roboterplattformen für die Durchmesserbereiche 8 bis 14 Zoll entwickelt und den verschiedenen Prüffirmen zur Verfügung gestellt.