Zum 28. Brennelementwechsel und zur jährlichen Anlagenrevision ging das Kernkraftwerk Grafenrheinfeld am 6. März 2010 vom Netz. Während dieser Revision war es die Aufgabe von INSPECTOR SYSTEMS, Abschnitte des TH-Rohrleitungssystems mithilfe von ferngesteuerten Rohrrobotern von innen zu prüfen.
Für diese Aufgabe hat INSPECTOR SYSTEMS gemeinsam mit zwei weiteren Firmen federführend insgesamt drei spezielle Rohrroboter entwickelt, mit denen eine visuelle Prüfung, eine Prüfung mittels Wirbelstrom und eine Wanddickenmessung mit Ultraschall durchgeführt werden kann. Außerdem können im Bedarfsfall auch Bogenlängsnähte und Rundnähte von innen beschliffen werden. Die besondere Herausforderung an die Konstruktion der Rohrroboter bestand darin, dass sie durch eine Armatur mit kleinem Durchmesser in die Rohrleitung eingesetzt werden mussten.

{kind=link}
{kind=link}
{kind=link}
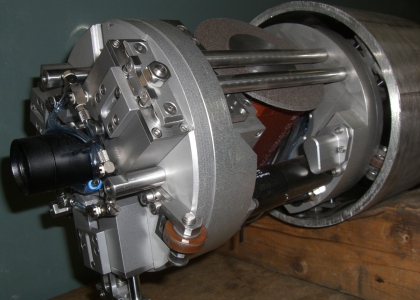
Für die Bearbeitung der Rohrinnenoberfläche wurde ein Schleifroboter konzipiert. Dieser basiert auf der von INSPECTOR SYSTEMS entwickelten und von verschiedenen nationalen und internationalen Unternehmen bzw. Organisationen qualifizierten Schleifrobotertechnologie zur Innenbearbeitung von Schweißnähten in Kernkraftwerken. Der Schleifroboter dient zum Beschleifen von Längsnähten im Bogenbereich der TH-Rohrleitung und ist so konzipiert, dass Bogenlängsnähte, Rundnähte und auch das Grundmaterial der Rohrleitung beschliffen werden können. Das Schleifmodul besteht aus einem leistungsstarken Drehstrommotor mit Schleifscheibe, einer Dreheinheit mit einem Drehwinkel von 380° und einer Radialzustellung für den Schleifmotor. Zum Auffinden der zu beschleifenden Bogenlängsnähte ist der Roboter mit einem Induktivsensor und einem Inklinometer ausgestattet. Eine Absperrvorrichtung dichtet den vor der Schleifeinheit liegenden Rohrleitungsabschnitt gegenüber Schleifstaub ab und vermindert so eine Verschleppung von Schleifstaub innerhalb der Rohrleitung.
Um Rohrbögen gleichzeitig mit dem Wirbelstrom- und dem Ultraschallverfahren zu prüfen, wurde ein Wirbelstrom- Ultraschall-Prüfroboter entwickelt. Er ist mit zwei schwenkbaren Sensorarmen ausgestattet und rotiert kontinuierlich. Eine kardanische Aufhängung ermöglicht es, die Sonden während der Bogenfahrt orthogonal zur Prüfoberfläche zu führen. Die Dreheinheit mit Schleifring sorgt für eine kontinuierliche Drehbewegung der Sondenarme. Das von der Firma Kontrolltechnik entwickelte Prüfmodul wurde an das Antriebssystem von INSPECTOR SYSTEMS adaptiert. Durch diese Kopplung können auch vertikale Rohrleitungsabschnitte des TH-Systems geprüft werden.
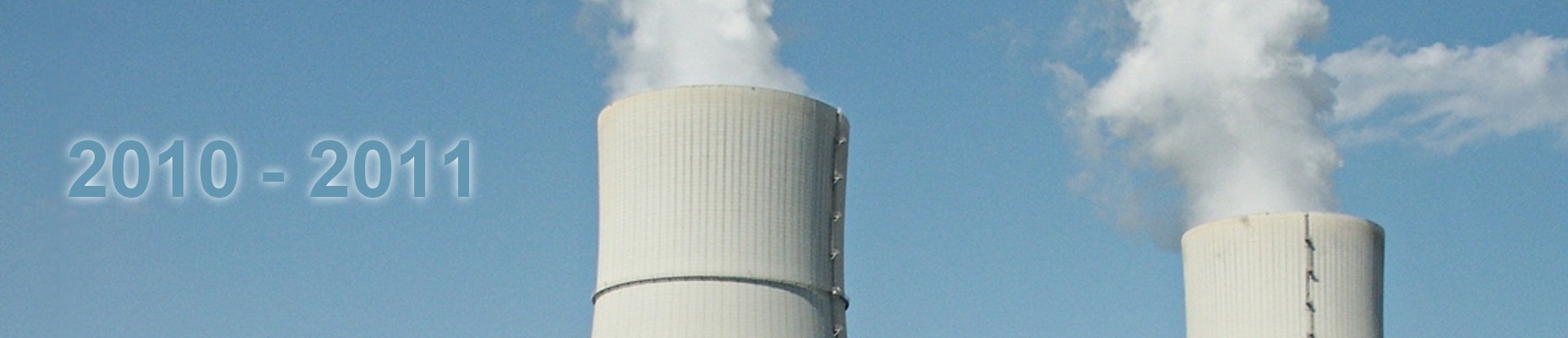
Des Weiteren wurde ein Inspektions- Absaugroboter gefertigt, welcher zwei Funktionen in einer Maschine integriert: Er besteht aus einer Videoinspektionseinheit zur qualifizierten visuellen Prüfung innerhalb des THRohrleitungssystems und einer Absaugeinheit zum Reinigen der Rohrleitung nach dem Beschleifen. Der Inspektions-Absaugroboter beinhaltet ein hochauflösendes Kameramodul mit zehnfach optischem Zoom, einen automatischen sowie manuellen Fokus und eine leistungsstarke Beleuchtungseinheit, deren Beleuchtungsstärke regelbar ist. Zusätzlich ist die Inspektionseinheit noch mit einem Laser ausgestattet, der in die Dreheinheit integriert ist und somit jeden Punkt am Innenumfang des Rohres erreichen kann. Er ermöglicht es, Rohrleitungsbereiche mit einer Genauigkeit von 0,2 mm zu vermessen. Somit dient der Laser zur genauen Bewertung und Klassifizierung des Kamerabildes.
Die Absaugeinrichtung ist auf der Dreheinheit des Rohrroboters montiert. Sie besteht aus einem Absaugschlauch, einem Führungsrohr, einer Kamera und einer motorischen Schlauchzustellung. Der Absaugschlauch wird motorisch über eine Zustellung in Richtung der Rohrwand gefahren und der Absaugvorgang wird mit der Absaugkamera überwacht. Mit dem Inspektions-Absaugroboter ist es somit möglich, jede Stelle der TH-Rohrleitung anzufahren und dort gezielt abzusaugen.
Alle drei Rohrroboter basieren auf dem bewährten Konzept von INSPECTOR SYSTEMS. Sie bestehen aus jeweils drei Antriebseinheiten und einem Prüf- bzw. Bearbeitungskopf. Diese Module sind flexibel durch Faltenbälge miteinander verbunden. Das ermöglicht das Befahren des gesamten TH-Rohrleitungssystems mit vertikalen Abwschnitten und Rohrbögen mit einem Biegeradius von 1,5D. Die Rohrroboter wurden zusammen mit dem Betreiber E.ON Kernkraft und dem Gutachter TÜV Süd ohne Beanstandung qualifiziert und während der Revision im Kernkraftwerk Grafenrheinfeld erfolgreich eingesetzt.